TF-UW500 Underwater Single-Point LiDAR
TF-UW500, dToF (Direct Time-of-Flight - Doğrudan Uçuş Süresi) çözümünü benimsemekte olup, selefinin kompakt tasarımını ve düşük güç verimliliğini korurken; düşük bulanıklığa sahip sularda algılama menzilinde on kat artış sağlamaktadır. Bu sayede sualtı robotlarının hem hassas haritalama hem de kararlı konumlandırma konularında çığır açmasına olanak tanır.
Sistem, göz güvenliği sağlayan Sınıf 1 (Class 1) görünür bir lazere sahiptir ve mükemmel yönsellik ile geniş insidans (gelme) açısına sahip küçük bir lazer noktası sunar. Santimetre düzeyinde doğruluk ve milimetre düzeyinde tekrarlanabilirlik ile TF-UW500, istisnai bir mesafe ölçüm hassasiyeti sağlar.
TF-UW500 Öne Çıkan Özellikler
- Gelişmiş Algoritmalar: Donanım seviyesinde filtreleme ile gelişmiş parlama önleyici (anti-glare) algoritmaları birleştirerek güçlü ışık altında veya bulanık suda kararlı performansını sürdürür.
- Geniş Kalibrasyon Aralığı: 10'dan fazla yaygın havuz malzemesine göre kalibre edilmiş olup, yalpalama (wobble) yapmadan tutarlı doğruluk ve pürüzsüz sualtı navigasyonu sağlar.
- Menzil ve Hassasiyet: 5 metre sualtı ölçüm menziline sahiptir.
- Güvenilirlik: Geleneksel ultrasonik sensörlerde görülen çok yollu (multipath) girişimleri en aza indirir.
- Navigasyon Desteği: Tam yol koordinat konumlandırması ile haritalamaya olanak tanır ve atalet sürüklenmesini (inertial drift) minimize eder.
- Çevresel Direnç: Güçlü ışığa ve bulanıklığa karşı dirençlidir.

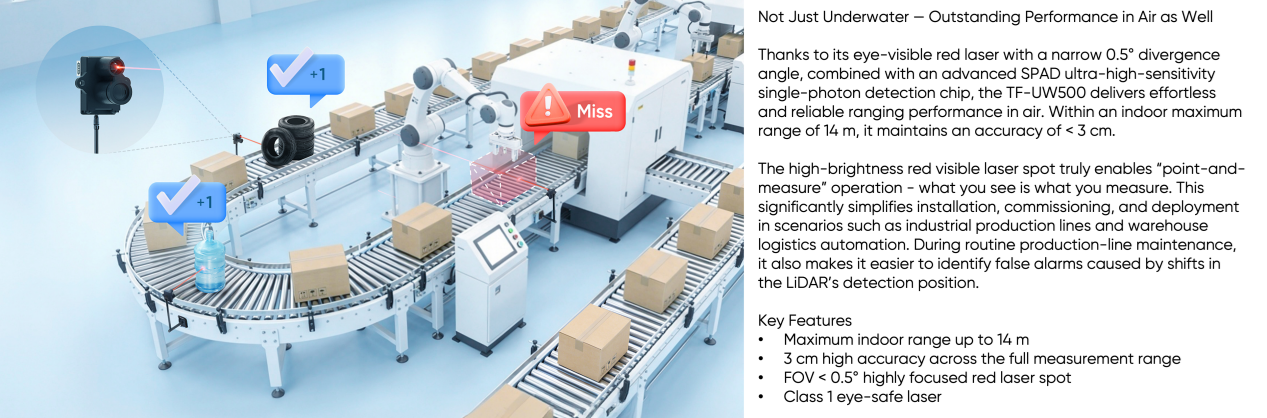
TF-UW500 Sadece Sualtında Değil – Havada da Üstün Performans
0,5° dar sapma (divergence) açısına sahip kırmızı lazeri ve gelişmiş SPAD (tek foton algılama) çipi sayesinde TF-UW500, hava ortamında da güvenilir mesafe ölçüm performansı sunar:
- Maksimum İç Mekan Menzili: 14 metreye kadar.
- Hava Ortamı Doğruluğu: Tüm ölçüm menzili boyunca < 3 cm doğruluk.
- "Point-and-Measure" Operasyonu: Yüksek parlaklıktaki görünür lazer noktası, kurulum ve devreye alma süreçlerini basitleştirerek endüstriyel üretim hatları ve depo lojistik otomasyonu için ideal bir çözüm sunar.
TF-UW500 Uygulama Alanları- Sualtı operasyon ve çalışma robotları (örneğin; robotik havuz temizleyicileri) için haritalama ve yerelleştirme (localization).
- Robotlarda engel aşma (obstacle avoidance).
- Lojistik ve endüstriyel otomasyon için mesafe ölçümü ve nesne algılama.
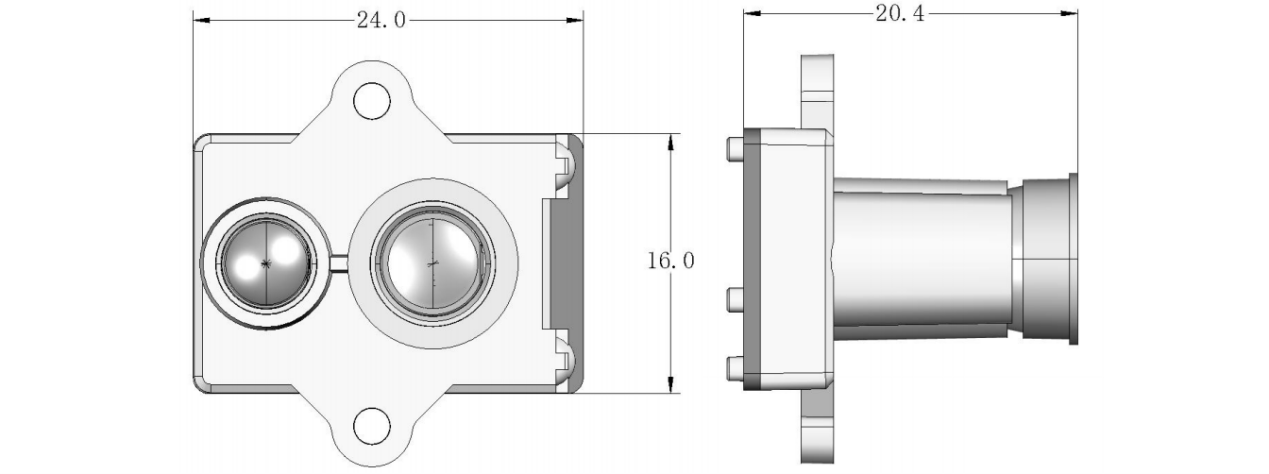
TF-UW500 Teknik Çizim ve Boyutlar- Genişlik: 24.0 mm
- Yükseklik: 16.0 mm
- Derinlik: 20.4 mm
Ek Kaynaklar:
TF-UW500 3D Drawing
TF-UW500 User Manual
| TF-UW500 Benewake Underwater Single-Point LiDAR |
| Performance Parameters |
| Model | TF-UW500 |
| Detection range under water | > 5 m Indoor, NTU< 0.5, 30% reflectivity, the light beamis perpendicular tothe target surface |
| Blind zone | ≤ 0.1 m |
| Accuracy | < 3 cm (0.1 ~ 2m) |
| Repeatability | < 1 cm @ 1σ(0.1 ~ 2m) |
| Distance resolution | 1 mm |
| Default frame rate | Default 20 Hz |
| Ambient light resistance | 100 KLux |
| Optical Parameters |
| Light source | Laser |
| Central wavelength | Red |
| FoV | < 0.5° |
| Eye safety | Class1 (IEC 60825-1:2014; EN 60825-1:2014+A11:2021) |
| Mechanical and Electrical Parameters |
| Average power consumption② | < 5V × 100mA |
| Peak current at start up | < 700mA |
| Power supply | DC 5±0.2 V |
| Logical voltage | 3.3 V TTL |
| Connector | 1.0mm-4P, model is HC-1.0-4PWT |
| Operating temperature | Operating temperature |
| Storage temperature | - 20 ℃ ~ +70 ℃ |
| Protection level | NA |
| Typ. Dimensions | 24.0 mm × 16.0 mm × 20.4 mm |
| Typ. Weight | < 5 g (excluding cables) |
| Communication Protocol |
| Communication Interface | UART / I²C (Can be switched by command) |
| Baud rate | Default 115200 (Configurable) |
| Data bit | 8 |
| Stop bit | 1 |
| Parity | None |